Obtaining successful in-vivo electrophysiological recordings with silicon neural probes requires a set of carefully executed activities which include:
- Careful planning of the optimum insertion path.
- Accurate placement of the probe to enter the brain at the designated start target.
- Slow, controlled insertion of the probe, stopping at the desired end target.
In this article we will briefly describe two tools that work in harmony to accomplish these three objectives: the Trajectory Explorer and the Virtual Coordinate System.
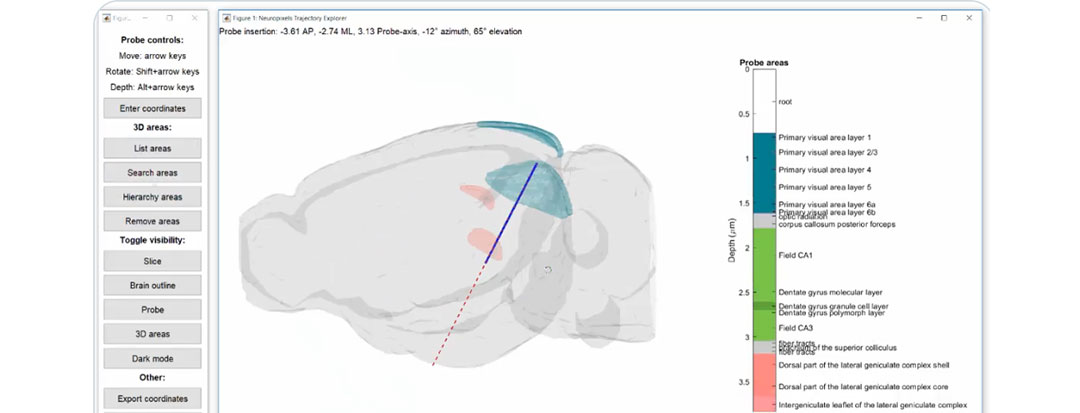
Insertion Planning with the Trajectory Explorer
It is often the case that, while the target region of the brain to be explored is well known, the best path to reach that region is not clear. Fortunately, tools have been developed that help in the selection of the optimum insertion path.
One such tool is the Neuropixels Trajectory Explorer created by Andy Peters at University College London. (Now at the Peters Lab, University of Oxford.)
Neuropixels Trajectory Explorer by Andy Peters, UCL – Follow Andy on Twitter
Watch Andy Peters’ full 20-minute video demo of the Trajectory Explorer on YouTube
The Trajectory Explorer software, including high level documentation, is available on github at https://github.com/petersaj/neuropixels_trajectory_explorer. The gitub wiki includes a how-to guide showing an example of trajectory planning.
Once a trajectory has been established, the Trajectory Explorer can output quantitative data indicating probe start points, end points and angles.
Hitting the Target with the MPM Manipulator and VCS
The Trajectory Explorer operates within the Allen Common Coordinate Framework (Allen Mouse CCF), to which a CCF-to-Bregma coordinate transformation has been applied. In this coordinate system, Bregma is the Origin.
The New Scale MPM Multi-Probe Micromanipulator includes Virtual Coordinate System (VCS) software that operates within a 3D Brain Atlas, with Bregma acting as the Origin and where X=ml, Y=ap and Z=dv.
In any given physical experiment, the system is calibrated by touching the probe to Bregma, then Lambda of the test animal. With these points established as a reference, VCS centers and rotates the VCS atlas coordinates to match the actual orientation of the test animal. Therefore the Trajectory Explorer and VCS are operating in the same 3D coordinate space and VCS has accurately calibrated this test animal into that space.
The Trajectory Explorer can output the 3D Atlas Start Point coordinates (ap,ml,dv) and End Point coordinates (ap,ml,dv) for the chosen insertion path. When these coordinates subsequently are entered into VCS, the system determines the hardware setup parameters (Polar Angle, Pitch Angle, Arm Height and Arm Length) required to hit that trajectory with the MPM hardware.

The MPM system can even be set up in advance of the experiment, and then fine tuned once the test animal is head fixed in place. Learn more about the MPM Multi-Probe Micromanipulator System.
Ready to Learn More?
Please contact us to learn more about using the Trajectory Explorer with the MPM Multi-Probe Micromanipulator and Virtual Coordinate System. We would be happy to work with you!
Email NSTsales@newscaletech.com or call +1 (585) 924 – 4450.